







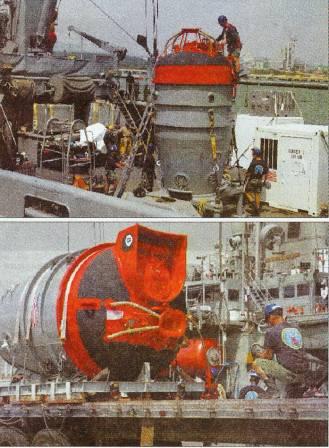
| Перспективы развития систем спасения экипажей подводных лодок ВМС США Капитан 1 ранга И. Белоусов Командование и соответствующие службы ВМС США придают важное значение совершенствованию системы аварийно-спасательного обеспечения подводных сил, особенно в прибрежных морских районах. В этих целях реализуется программа развития сил и средств, способных эффективно решать задачи по оказанию помощи и спасению экипажей аварийных подводных лодок, находящихся на грунте в районах с глубинами моря до 600 м. В настоящее время американскими подводниками отрабатываются следующие способы эвакуации с аварийной ПЛ: самостоятельно с использованием индивидуального спасательного снаряжения, с помощью спасательных подводных камер, подводных аппаратов и модулей. Для обеспечения самостоятельного выхода подводников из отсеков-убежищ подводной лодки, находящейся на грунте на глубине до 180 м, применяется, как правило, метод свободного всплытия с использованием индивидуального снаряжения SEIE (Submarine Escape and Immersion Equipment) типа Mk 10 (рис. 1). При этом покидание лодки личным составом осуществляется двумя способами: через шлюзовую камеру и аварийно-спасательный люк (АСЛ) со средним темпом выхода шесть-восемь человек в час или после принудительного затопления отсека с выходом через люк, оборудованный тубусом, со средним темпом шесть человек в минуту. В штатный комплект снаряжения входят гидрокомбинезон, утеплитель и индивидуальный надувной спасательный плот с тентом. В качестве недостатков следует отметить отсутствие в комплекте индивидуального дыхательного аппарата. Для дыхания используется воздушный пузырь, сохраняющийся под фартуком комбинезона в течение всего процесса всплытия. В подводных силах американского флота имеются в наличии около 12 тыс. комплектов снаряжения SEIE Mk 10. В связи с тем что использование указанного способа связано с повышенной степенью риска для подводников, в качестве основного варианта рассматривается эвакуация личного состава с помощью спасательных подводных камер, аппаратов и модулей. Отряд глубоководных средств ВМС США (ВМБ Сан-Диего, штат Калифорния) располагает двумя спасательными подводными камерами SRC (Submarine Rescue Chamber). Спасательная камера SRC (называемая также «колоколом Маккэна») имеет массу 9,52 т, высоту 3,56 м, диаметр 2,1 м (рис. 2) и вмещает двух операторов и шесть эвакуируемых подводников. Она состоит из двух отсеков: верхнего, предназначенного для размещения операторов, эвакуируемых подводников, оборудования, переменного и постоянного балласта, и нижнего, обеспечивающего стыковку с АСЛ подводной лодки. Спуск спасательной камеры на рабочую глубину (до 260 м) и ее подъем осуществляются с использованием реверсивного пневматического двигателя по ходовому тросу, закрепленному на крышке люка ПЛ. При возникновении нештатной ситуации производится экстренный подъем камеры на поверхность с помощью страховочного троса с разрывным усилием 60 т. По оценке американских экспертов, находящиеся в эксплуатации спасательные подводные камеры не вполне соответствуют современным требованиям по безопасной эвакуации личного состава с аварийной ПЛ в декомпрессионную барокамеру, в том числе нормативам выполнения спасательных операций и возможностям неспециализированных кораблей и судов для их обслуживания. Более совершенную систему спасения экипажей аварийных подводных лодок с глубин до 610 м - SRDRS (Submarine Rescue Diving and Recompression System) - разработала группа американских и канадских компаний во главе с «Финикс Интернэшнл» (США). Ее основу составляет глубоководный спасательный модуль PRM (Pressurized Rescue Module) со спускоподъемным устройством и лебедкой, стыкуемый после всплытия с двумя декомпрессионными барокамерами - SDS (Submarine Decompression System), транспортируемыми на судне-носителе. В комплект оборудования новой системы входят также четыре жестких нормобарических водолазных скафандра HS-2000 (рис. 3) системы ADS (Atmospheric Diving System) с тремя спускоподъемными устройствами, модуль управления с аппаратурой связи и навигации, специальные контейнеры со вспомогательным снаряжением (компрессоры, дизель-генераторы, баллоны со сжатым воздухом, лебедки и т. п.). Скафандр канадской фирмы «Оушен уоркс интернэшнл» предназначен для обследования водолазами лежащей на грунте аварийной лодки в целях первичного анализа ситуации, принятия мер по поддержанию жизнедеятельности ее экипажа (подсоединение шлангов с воздухом высокого давления и кабелей электропитания), расчистки комингс-площадки АС Л и подготовки его к стыковке со спасательным модулем. Скафандр, представляющий собой прочную антропоморфную конструкцию, изготовлен из высокопрочного алюминиевого сплава марки 6061 Т651 со специальным защитным покрытием и рассчитан на рабочую глубину погружения 650 м. В собранном виде он имеет размерения 242,6 х 122 см и массу (без водолаза-оператора) 518 кг. Скафандр оснащен движительно-рулевой системой (четыре электромотора с вертикально и горизонтально расположенными гребными винтами в направляющих насадках), позволяющей работать в условиях переменных придонных течений скоростью до 1,5 уз, аппаратурой связи (проводной, аварийной радиотелефонной и гидроакустической), светильниками, высокочувствительной видеокамерой, адаптерами для использования механического и гидравлического инструмента, а также встроенным газоанализатором. Система жизнеобеспечения позволяет водолазу работать до 8 ч на глубине до 610 м. Аварийное оборудование включает устройства сброса движительного-рулевого блока, балласта и отсоединения кабель-шланговой связки, гидроакустический и УКВ-ответчики, проблесковый маячок. В ходе испытаний скафандра, проведенных на полигоне отряда глубоководных средств ВМС США в 2006 году, было выполнено погружение на рабочую глубину более 600 м. При создании модуля PRM фирмами «Оушен уоркс интернэшнл» и «Интернэшнл сабмарин инжиниринг» за основу был принят проект спасательного аппарата «Ремора», разработанного ранее для австралийских ВМС. Модуль представляет собой привязной ПА (массой 22 т, длиной 7,6 м, шириной 2,4 м, высотой при транспортировке 2,4 м). Он состоит из отсека цилиндрической формы для размещения штатно до 16 эвакуируемых подводников и двух операторов, спасательного оборудования, движительно-рулевого комплекса, а также из полусферического стыковочного узла с шарнирно сочлененной насадкой (размеры соответствуют стандартным размерам комингс-площадок АС Л подводных лодок ВМС стран НАТО). Применение узла такой конструкции позволяет модулю при стыковке с аварийной подводной лодкой сохранять горизонтальное положение при углах крена и дифферента лодки до 45 град. На внешней раме PRM установлены гидроакустические станции, навигационное оборудование, аппаратура звукоподводной связи, телевизионные камеры (12 единиц), светильники, а также системы жизнеобеспечения. Движительно-рулевой комплекс с 12 электродвигателями постоянного тока с винтами в кольцевых направляющих насадках обеспечивает маневрирование аппарата с высокой точностью, в том числе зависание при скорости подводного течения до 2 уз и посадку на комингс-площадку лодочного люка. Управление подруливающими устройствами может осуществляться дистанционно с судна-носителя с использованием данных, поступающих от телекамер и гидроакустических станций по волоконно-оптическому кабелю, или вручную экипажем аппарата (рис. 4). Перед приемом подводников внутрикорпусное давление в модуле и отсеке лодки выравнивается (максимальное давление в отсеке может достигать 5 атм). После подъема на палубу судна-носителя носовой люк модуля состыковывается с переходным отсеком декомпрессионных барокамер, и подводники размещаются в одной из них. Максимальная вместимость барокамер может составлять 66 человек (33 в каждой). Это позволяет, например, выполнить эвакуацию экипажа аварийной лодки численностью 155 человек за 10 операций погружения и всплытия модуля средней продолжительностью 5 ч каждое. Эксплуатационные возможности системы ограничены волнением моря до 5 баллов. Основной этап морских испытаний спасательного модуля осуществлен в мае-июне 2007 года у побережья Канады со специально оборудованной баржи близ порта Ванкувер (рис. 5). При погружениях на рабочую глубину и стыковках с макетом аварийно-спасательного люка ПЛ были подтверждены заданные тактико-технические характеристики аппарата. Суммарные затраты на его создание и испытания составили, по оценкам разработчиков, более 100 млн долларов. Элементы системы SRDRS размещаются в специально оборудованных 20-, 30- и 40-футовых морских контейнерах, что позволяет транспортировать их различными судами среднего водоизмещения (океанские буксиры, килекторные суда, суда обслуживания морских нефтепромыслов и др.). Площадь верхней палубы, занимаемая контейнерами, спускоподъемным устройством и вспомогательным оборудованием системы, составляет 270-310 м2. Потенциальные суда - носители системы (при ее полной комплектации) должны отвечать следующим основным требованиям: длина не менее 60 м, ширина 12 м, экономическая скорость хода 13 уз, автономность 13 сут (из расчета по 12 ч на переход в район и обратно, 12 сут на проведение спасательной операции), экипаж 20 человек, размеры верхней палубы 28 х 10 м, допустимая динамическая нагрузка на элементы набора верхней палубы 3,8 т/м2. Доставка оборудования в район порта, ближайшего к месту аварии подводной лодки, может осуществляться самолетами транспортной авиации (С-5, С-17, С-130, С-141В, Ан-124, Ан-225). В соответствии с установленными временными нормативами комплект системы должен быть доставлен автотранспортом в аэропорт и загружен в самолет в течение 8 ч после получения разрешения на проведение спасательной операции. Размещение на палубе судна-носителя должно занимать не более 18 ч. Считается, что временной промежуток от момента получения сигнала тревоги до подъема на поверхность первой партии подводников не превысит 72 ч. Ввод системы в эксплуатацию осуществляется поэтапно. В апреле 2008 года завершена передача отряду глубоководных средств ВМС США (ВМБ Сан-Диего) в дополнение к имеющимся водолазным скафандрам, глубоководного спасательного модуля со вспомогательным оборудованием и аппаратурой. В мае-июне 2008 года была проведена практическая отработка данных подсистем, размещенных на океанском буксире «Апач» (T-ATF-172) типа «Поухатан» в ходе учений ОВМС НАТО «Болд монек-2008» у южного побережья Норвегии (рис. 6). Переброска оборудования из Сан-Диего в Норвегию была осуществлена на транспортных самолетах Ан-124. В сентябре проведены испытания системы, размещенной на океанском буксире «Навахо» (T-ATF-169). В качестве «аварийной» была задействована ПЛ «Симпсон» проекта 209-1300 ВМС Чили. К 2012 году предполагается принять в эксплуатацию все элементы системы, включая декомпрессионные барокамеры, и окончательно ввести ее в строй. В целом, по оценкам американских специалистов, принятие на вооружение ВМС США новой системы спасения в качестве замены глубоководного спасательного подводного аппарата DSRV-1 (Deep Submergence Rescue Vehicle) «Мистик» позволит существенно расширить возможности по оказанию своевременной помощи экипажам подводных лодок, терпящих бедствие в шельфовой зоне Мирового океана. Необходимо отметить, что характеристики системы SRDRS соответствуют единым требованиям ОВМС НАТО по стандартизации и обеспечению конструктивной совместимости с соответствующим оборудованием существующих и перспективных подводных лодок. Это позволит использовать американскую и новую европейскую систему NSRS (NATO Submarine Rescue System) аналогичного назначения в составе единой международной системы спасения экипажей аварийных подводных лодок.
Зарубежное военное обозрение №9 2009 С.64-68 Смотрите также | |||||||||||||
|
| |||||||||||||
| Просмотров: 4520 | | | |||||||||||||





| Всего комментариев: 0 | |